In de verpakking van het frame vind je de onderplaat met daarin verwerkt een power distribution bord (PDB), de vier armen die tevens als landingsgestel dienen, de bovenplaat en boutjes voor alle mogelijke aansluitingen. We zullen onderdelen op het frame bevestigen naarmate we deze opbouwen. We beginnen met de onderplaat en omdat daar een power distribution bord in verwerkt is, maken we gelijk een begin aan de stroomkring op de quadcopter.
De stroomkring door de batterij, ESC’s en de motors loopt via de geïntegreerde koperkabels in de onderplaat. Er moeten in totaal tien kabels op de onderplaat gesoldeerd worden. Omdat je hiervoor genoeg werkruimte wilt hebben, is het verstandig het frame nog niet in elkaar te zetten. Iedere ESC heeft een positieve en negatieve aansluiting op het PDB nodig en ook de batterij wordt met twee aansluitingen verbonden aan dit bord. Op figuur 1 is te zien hoe de ESC’s zijn aangesloten op het PDB. Soldeer bij iedere ESC de rode kabel aan een pluspunt, en de zwarte aan het minpunt van de aansluiting op het PDB. Let hierbij op de hoek tussen de kabels, de armen van het frame moeten over deze kabels heen passen, dit kun je zien op figuur 2.
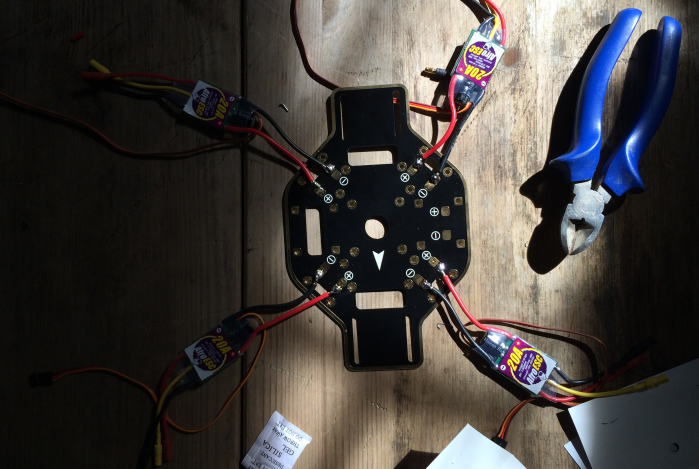
Figuur 1: het power distribution bord met alle ESC’s aangesloten.

Figuur 2: de koperkabels uit de ESC zijn iets naar binnen gesoldeerd zodat de armen van het frame ook op het PDB passen.
De batterij moet ook aangesloten worden op het PDB, maar niet permanent omdat je deze tijdens transport of opladen van het frame af zal moeten halen. Uit de batterij komt een rode en een zwarte draad, die samen aan een male XT-60 plug zitten. Op het PDB zul je een female XT-60 plug moeten aansluiten, hieraan kun je namelijk de male XT-60 plug van de batterij verbinden. Om de batterij aan het PDB te verbinden, heb je twee koperkabels nodig, ongeveer even dik als de kabels uit de batterij, en een female XT-60 plug. Strip twee koperkabels van ongeveer 5 cm aan allebei de kanten 1 cm. Soldeer de twee kabels aan een eigen aansluiting op de XT-60 plug. Soldeer dan de andere uiteinden van beide draden aan de zijkant van het PDB. Zorg dat kabel aan het verlengde van de rode kabel uit de batterij aan de plus wordt aangesloten, en de kabel aan het verlengde van de zwarte kabel uit de batterij aan de min. Dit is ook te zien op figuur 3 en 4.

Figuur 3: een male XT-60 plug (links) en een female XT-60 plug (rechts) met plus en min aansluiting aangegeven.
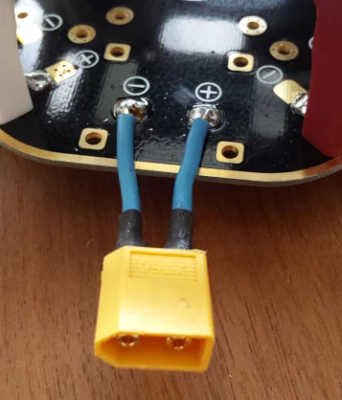
Figuur 4: de female XT-60 plug gesoldeerd aan het PDB.
Nu al het soldeerwerk op het PDB is gedaan, maken we de motors vast op de armen van het frame. Zorg dat de drie kabels uit de motor richting het midden van het frame lopen, en maak hem vervolgens vast met de vier meegeleverde inbusboutjes. Er waren in ons geval bij de motors én het frame bijpassende boutjes meegeleverd, deze zijn identiek als je de goede combinatie hebt gekozen. Het aansluiten van de kabels aan de kabels van de ESC’s doe je pas nadat je de armen hebt vastgemaakt aan het frame.
Nu kunnen de armen over de gesoldeerde stroomkabels van de ESC’s geplaatst worden. Bij ons frame horen twee witte armen en twee rode. De witten armen geven de voorkant van het frame aan, en de rode de achterkant. Dit is deels decoratief, de armen zijn immers identiek, maar tijdens vliegen is het wel handig te weten wat de voor- en achterkant van jouw quadcopter is. Maak de witte armen vast aan de voorkant van het PDB, de kant met de pijl, en de rode armen aan de achterkant. Het lijkt nu nog geen stevige constructie, maar na het plaatsen van de bovenkant van het frame later, zitten de armen goed vast.
Onder iedere arm van het frame ligt nu een losse ESC. Uit elke motor komen drie kabels die niet te onderscheiden zijn, en uit elke ESC komen ook 3 kabels, een rode, een gele en een zwarte. De handigste en veiligste plek om de kabels aan elkaar vast te maken is onder de arm. Duw de drie kabels die uit de motor komen door het frame, zodat ze aan de onderkant van de arm komen. Hierdoor kunnen ze ook nooit in de buurt van een draaiende propeller komen. Verbind de kabels tussen de motors en de ESC’s. De volgorde hiervan is nog onbelangrijk, deze heeft namelijk alleen invloed op de draairichting van de motors, en die zul je later pas moeten kiezen. Verstandig is nog om de loshangende ESC’s met tyraps vast te maken aan het frame, niet te strak, zodat er nog ruimte is om de kabels later onderling te verwisselen.
Nu moet je gaan nadenken over de plaats van de overige onderdelen. De onderdelen die nog op het frame bevestigd moeten worden zijn de batterij en het printplaatje met onze eigen flightcontroller. Er zijn 3 plaatsen waar je onderdelen kan plaatsen, namelijk: onder het PDB, op het PDB en op het plaatje dat bovenop de armen komt (deze hebben we nog niet vastgemaakt). We raden aan het printplaatje niet aan de onderkant van het PDB te monteren omdat dit een gevaarlijke plek is voor de kwetsbare apparatuur en omdat het moeilijk is daar überhaupt iets te bevestigen. Het printplaatje kan echter wel óp het PDB of op het bovenste plaatje van het frame. Op het PDB zit het printplaatje veilig, maar is het een beetje krap en moeilijk bereikbaar. Bovenop het frame is de situatie precies omgekeerd, hier is het printplaatje makkelijk bereikbaar, makkelijk te monteren maar minder veilig. Wij hebben voor de laatste optie gekozen, omdat bereikbaarheid van de onderdelen op het printplaatje erg belangrijk is. Je zal tijdens het programmeren heel vaak kabels moeten aansluiten of veranderen, en dit is op deze plek heel makkelijk. Bovendien was het veiligheidsprobleem makkelijk op te lossen door een hersluitbaar bakje te maken, dit leggen we later uit.
Aan de positie van de batterij zijn minder eisen. Omdat we voor het printplaatje al plaats bovenop het frame gereserveerd hebben, moet de batterij onder het PDB óf op het PDB komen. De batterij moet aangesloten worden op de XT-60 plug die we al aan het PDB vastgemaakt hebben, dus de batterij moet hierbij in de buurt komen. Beide locaties zijn hier prima voor. Omdat je óp het PDB weinig ruimte hebt om de batterij los en vast te maken, iets wat je vaak zal moeten doen, hebben we de batterij onder het PDB gemonteerd. Het makkelijkst is de batterij te bevestigen met behulp van klittenband. Gebruik klittenband dat aan beide kanten plakband op de achterkant heeft, zodat je het in principe aan ieder oppervlak kan bevestigen. Kijk voordat je de batterij vast maakt even hoe sterk het klittenband is. Je wilt natuurlijk niet dat de batterij lost komt, maar als hij te sterk vast zit kan het gebeuren dat je het plastic om de batterij beschadigd met het losmaken. Vaak hoef je dus niet het hele oppervlak te bedekken met klittenband.
Nu we weten dat we geen onderdelen zullen plaatsen tussen het PDB en het bovenste plaatje van het frame, kunnen we het bovenste plaatje aan de armen bevestigen. Gebruik hiervoor de vier inbusboutjes per arm die meegeleverd zijn met het frame.

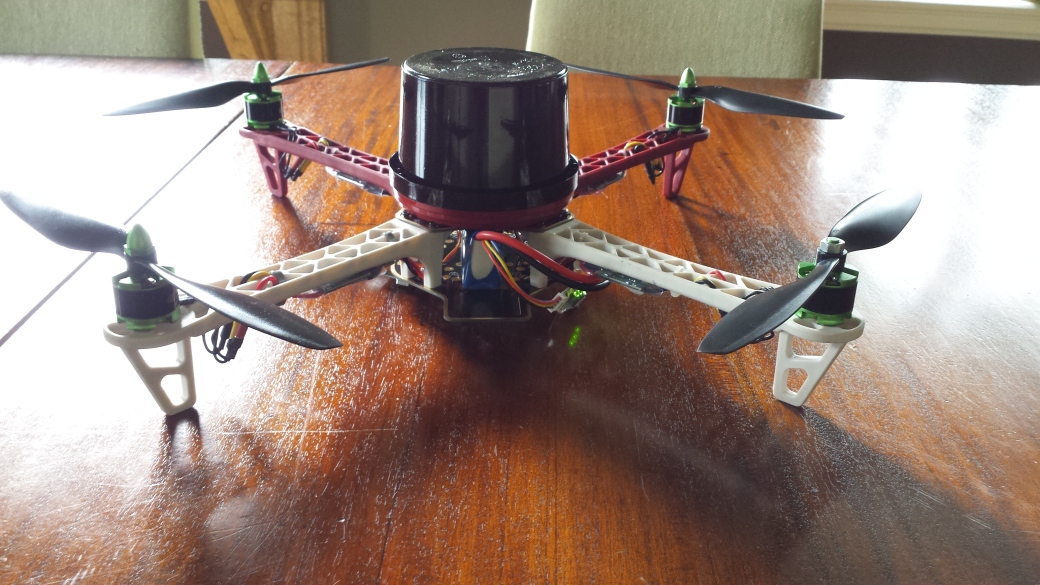
Figuur 5: het frame van de quadcopter met de motors en ESC’s verbonden.
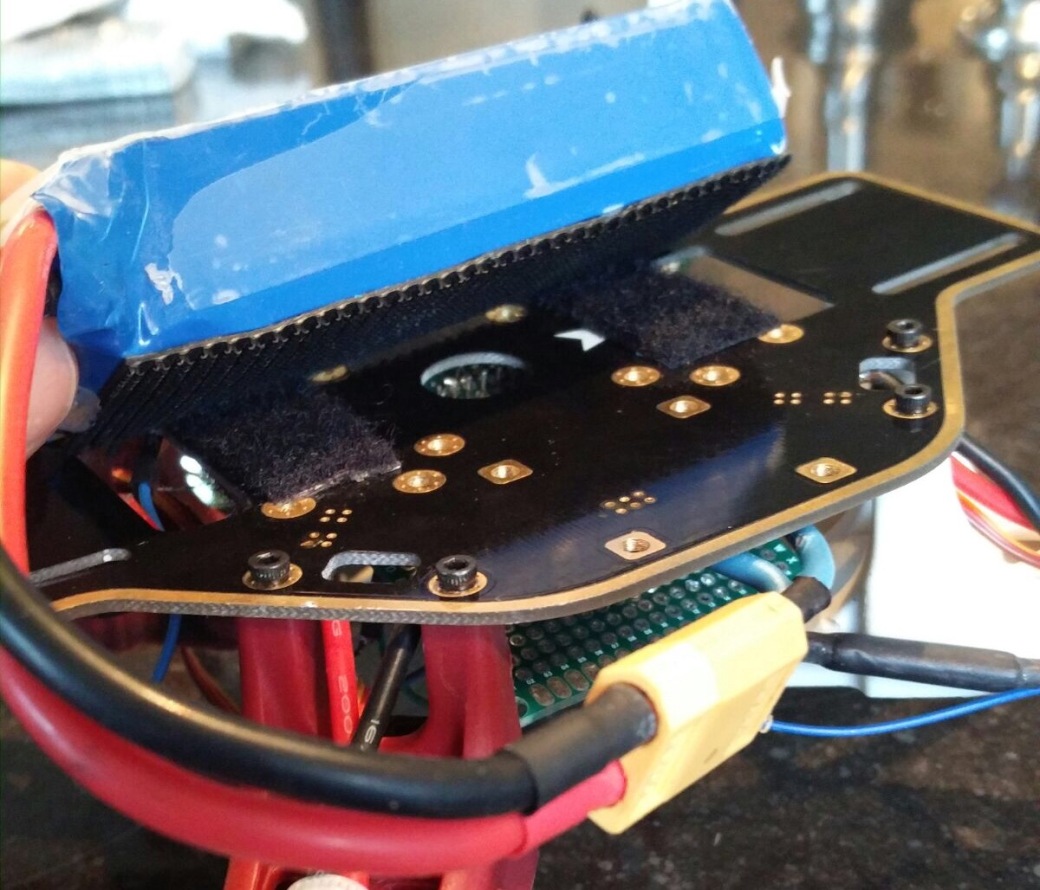
Figuur 6: de onderkant van het frame met de batterij bevestigd.
Nu kunnen we beginnen aan het printplaatje. Deze moet plaats bieden aan de Arduino Nano, de NRF24L01 en de gyroscoop. Door een printplaatje te gebruiken kun je deze onderdelen makkelijk en overzichtelijk plaatsen en verbinden. Naast de onderdelen op het printplaatje, moeten ook alle ESC’s verbonden worden met de Arduino. Uit iedere ESC komen drie dunne kabels, een bruine, een rode en een gele. De gele kabel wordt gebruikt om waardes te versturen van de Arduino naar de ESC, de rode kabel om stroom te leveren aan de Arduino en de bruine om negatieve stroom te ontvangen van de Arduino. Iedere ESC moet met de gele kabel aangesloten worden op de Arduino, de moters moeten immers afzonderlijk aan te sturen zijn. Daarnaast moet iedere ESC met de zwarte kabel aangesloten zijn op een pin header die alle ‘negatieve stroom uit’ van de Arduino, de gyroscoop, de ontvanger en het ledje kan ontvangen. Tot slot moet één ESC met de rode kabel aangesloten worden op de Arduino om deze van stroom te voorzien.
Alle onderdelen die we op het printplaatje plaatsen, moeten via de pins aan elkaar verbonden worden. Als je de onderdelen op het printplaatje plaatst, steken aan de onderkant van het plaatje alle pins uit de onderdelen uit. Je zou de gewenste pins onder het printplaatje aan elkaar kunnen verbinden met behulp van een female-female kabel. Dan heb je echter heel veel draden onder het printplaatje lopen, hierdoor is hij moeilijk te bevestigen aan het frame en wordt het geheel onoverzichtelijk. Om de kabels boven het printplaatje te laten lopen gebruik je male-male kabels. Steek de pins van de kabel in het vakje naast de pins van de poorten van de onderdelen die je wilt verbinden, en maak de naast elkaar staande pins aan elkaar vast. Je hebt nu de twee poorten van verschillende onderdelen aan elkaar bevestigd. Een voorbeeld van zo’n verbinding zie je schematisch in figuur 7. Hier stelt de rode lijn de male-male kabel voor en de zwarte lijnen de verbindingen tussen de pins van de draad en het onderdeel onder het printplaatje.

Figuur 7: voorbeeld van een verbinding tussen twee onderdelen op een printplaat.
Voor de verbindingen tussen twee pins, die in figuur 7 is aangegeven met een zwarte lijn, gebruikten wij eerst jumper connectors. Dit zijn plastic verloopstukjes tussen twee pins, waardoor je de pins kan verbinden zonder ze te solderen. Deze bleven echter zeer slecht zitten en waren dus totaal niet betrouwbaar. Daarom hebben we uiteindelijk ieder duo pins verbonden door ze aan elkaar te solderen. Omdat de pins zo dicht op elkaar zitten, moet je hier een zeer precieze soldeerbout voor gebruiken.
Ons printplaatje bleek iets te klein te zijn om naast alle onderdelen ook nog alle kabels uit de ESC’s op aan te kunnen sluiten. Wij hebben ervoor gekozen de ontvanger niet op het printplaatje te bevestigen. Deze sluit je straks met male-female kabels aan op de Arduino, de pins uit de male kant van de kabel worden onder het printplaatje gesoldeerd aan de pins van de Arduino, en de female kant van de kabels stop je rechtstreeks op de pins van de ontvanger.
Nu gaan we de indeling van de printplaat bepalen. Omdat de gyroscoop het beste werkt als deze centraal op de quadcopter geplaatst wordt, plaatsen we deze ook centraal op het printplaatje. De Arduino en de gyroscoop worden met vier kabels aan elkaar verbonden, voornamelijk aan de kant van de analoge poorten van de Arduino.Daarom plaatsen we de Arduino met de kant waar de analoge poorten zitten naast de kant van de gyroscoop waar de poorten zitten. Zorg dat er minstens drie rijen tussen de onderdelen vrij zijn, zodat er ruimte is om straks de pins te solderen onder de printplaat. De printplaat met de Arduino en de gyroscoop en hun onderlinge verbindingen is schematisch weergeven in figuur 8.

Figuur 8: schematische weergave van de verbindingen tussen de Arduino en de GY-87, allemaal met een male-male jumper wire.
Aan de rechterkant van de printplaat is nu nog plek vrij voor de kabels uit de ESC’s. Uit elke ESC komen drie kabels. Een gele voor signaal, een rode voor ‘positieve stroom uit’ en een bruine voor ‘negatieve stroom in’. Met een rode kabel kun je dus stroom geven aan de Arduino en met de bruine kabels kun je stroom ontvangen uit de onderdelen op de printplaat om de stroomkring te sluiten. Uit de rode kabels komt een voltage van 5 Volt, dit is genoeg voor de Arduino. De kabels uit de ESC’s hebben geen male, maar female aansluiting. We kunnen ze dus alleen aan de printplaat bevestigen met behulp van een pin header. Pak drie rijtjes van vijf pinnen en duw deze door de onderkant van het printplaatje zodat de pinnen aan de bovenkant uitsteken. Sluit op deze pinnen de twaalf female kabels van de ESC’s aan. Soldeer vervolgens aan de onderkant van de printplaat alle pins waar bruine kabels op aangesloten zijn aan elkaar. Verbind een van de rode kabels aan de VIN-poort van de Arduino door een male-male kabel in de gaten naast de gewenste pins te doen en deze vast te solderen, op dezelfde manier als de poorten van de gyroscoop en de Arduino verbonden zijn. Verbind op dezelfde manier ook de GND-poort van de arduino met het rijtje bruine kabels. Een schematische weergave van deze situatie is in figuur 9 te zien.

Figuur 9: schematische weergave van de complete stroomkring met de twaalf kabels uit de ESC’s aangesloten.
Hier zie je dat er ook een ledje aan het circuit is toegevoegd. Deze gebruiken we later bij het programmeren van de Arduino om te laten zijn in hoeverre de verbinding tussen onze transmitter en de quadcopter werkt. Sluit één kant van een male-male kabel aan de D2-poort van de Arduino door de pins onder het printplaatje aan elkaar te solderen en soldeer de andere kant van de kabel aan een weerstandje van 220 Ohm. Om de andere kant van het weerstandje aan het ledje te verbinden, soldeer je een jumper wire met gestripte uiteinden tussen het weerstandje en de ‘positieve stroom in’ aansluiting van het ledje. Om de stroomkring van het ledje te sluiten, soldeer je een kabel met een gestript stukje jumper wire aan het ledje en het andere uiteinde van de kabel aan de vrije pin van het rijtje bruine kabels. Op de schematische tekening zijn ook al twee kabels aan het printplaatje gesoldeerd voor de stroomvoorziening van de NRF24L01. Gebruik een male-female kabel om de NRF24L01 van stroom te voorzien. Soldeer de male aansluiting van de kabel onder het printplaatje aan de 3v3-pin van de Arduino. De female aansluiting verbinden we later aan de NRF24L01. Om de stroomkring van de NRF24L01 te sluiten gebruik je ook een male-female kabel. Soldeer de male aansluiting aan de vrije pin van het rijtje bruine kabels, waar ook de ‘negatieve stroom uit’ van het ledje al aan zit. De female aansluiting van deze kabel verbinden we later ook aan de NRF24L01.
Nu alle kabels die de stroomvoorziening van de onderdelen regelen op het printplaatje gesoldeerd zijn, verbinden we alle overige pins van de NRF24L01 en de vier gele signaalkabels met de Arduino. Verbind alle gele signaalkabels met male-male kabels aan de Arduino door de pins uit de kabel naast pins uit de gele kabel en zijn bijpassende poort op de Arduino te plaatsen en de pins onder het printplaatje aan elkaar te solderen. Sluit alle resterende pins uit de NRF24L01 aan op de Arduino met male-female kabels, net zoals we gedaan hebben met de ‘positieve stroom in’ kabel. Hoe alle pins precies verbonden moeten worden is schematisch te zien in figuur 10.
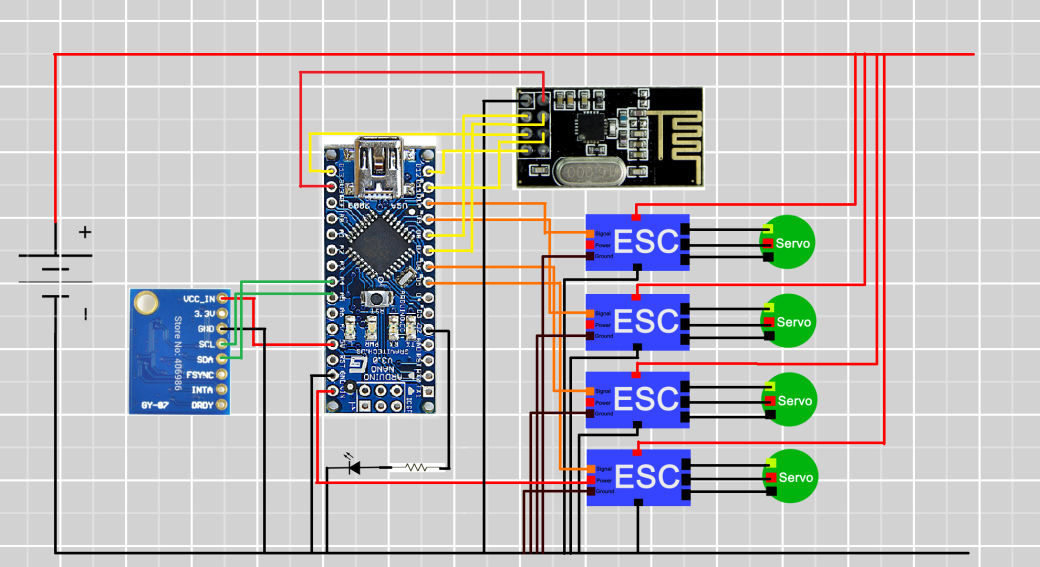
Figuur 10: schematische weergave van alle verbindingen op de quadcopter.
Omdat we pin headers hebben gebruikt om de twaalf kabels uit de ESC’s op het printplaatje aan te sluiten, zitten deze kabels niet permanent vast aan het printplaatje. Je kan het gehele printplaatje dus loshalen van de quadcopter, omdat deze alleen met de twaalf kabels uit de ESC’s vast zit aan de quadcopter.
Nu beginnen we aan het laatste onderdeel van de quadcopter: ons eigen hersluitbare bakje voor het printplaatje. Je zou het printplaatje ook los op de bovenkant van het frame kunnen bevestigen, maar hier is het erg kwetsbaar en bovendien moeilijk vast te maken. Bovenop het frame zitten vier gaten in een vierkant, maar deze komen niet overeen met onze rechthoekige printplaat. Daarom maken we de printplaat niet direct vast aan het frame, maar maken we de printplaat vast in een bakje en maken we dit bakje vast aan het frame. Dit bakje is in ons geval een leeg bakje satésaus. Je kunt in principe elk bakje gebruiken mits het printplaatje op het oppervlak van de deksel past, we gebruiken de deksel namelijk als onderkant van het bakje.
Maak in de deksel van het bakje vier gaten voor boutjes die via de buitenkant van de deksel door de vier gaten in het printplaatje gaan. Als je merkt dat de gaten op de goede plek zitten, haal je de boutjes weer uit de gaten. Nu moeten we namelijk nóg vier gaten maken, om de deksel aan het frame te bevestigen. Gebruik hiervoor de vier gaten in bovenkant van het frame en maak zelf vier bijpassende gaten in de deksel. Deze gaten moet je, in tegenstelling tot de gaten voor het printplaatje, nauwkeurig kiezen. De gyroscoop moet namelijk onder een bepaalde hoek op het frame komen, zodat de x-as langs twee overstaande motoren loopt en de y-as langs de andere twee. Deze configuratie kun je zien in figuur 11.

Figuur 11: schematische weergave van de positie van de printplaat ten opzichte van het frame.
De deksel wordt zó gedraaid dat het printplaatje onder een hoek van 45 graden komt te staan ten opzichte van het frame. Laat de deksel zo liggen, en haal vervolgens het printplaatje van de deksel af zodat je vier gaten kunt maken in de deksel die gelijk liggen met de vier gaten in het frame. In figuur 12 is te zien hoe de acht gaten in de deksel ten opzichte van elkaar geplaatst zijn.

Figuur 12: schematische weergave van de positie van de gaten voor het printplaatje (zwarte rechthoekjes) en de deksel (rode sterren).
Om het geheel aan elkaar te bevestigen, maak je eerst de printplaat vast aan de deksel, door via de onderkant van de deksel door de gaten in de printplaat vier boutjes te steken en deze vervolgens aan de bovenkant van de printplaat voorzichtig aan te draaien. Zorg wel dat de boutjes die gebruikt worden om de deksel aan het frame vast te maken al door de gaten in de deksel zitten, deze zijn namelijk niet meer bereikbaar als de printplaat aan de deksel is vastgemaakt.
Om het geheel aan elkaar te bevestigen, maak je eerst de deksel vast aan het frame, door via de bovenkant van de deksel door de gaten in de deksel en het frame vier boutjes te steken en deze vervolgens aan de onderkant van de bovenplaat van het frame aan te draaien met moertjes. Zorg wel dat de boutjes die gebruikt worden om de printplaat aan de deksel vast te maken al via de onderkant van de deksel door de deksel zijn gestoken, deze zijn namelijk niet meer bereikbaar als de deksel aan het frame is vastgemaakt. Plaats vervolgens de printplaat over de boutjes die uit de deksel komen en draai de moertjes tegen de bovenkant van de printplaat aan, zodat deze strak aan de deksel zit. Hou wel in gedachte dat onder de printplaat veel kwetsbare verbindingen zitten, dus je kan de moertjes niet erg strak aandraaien.
Plaats nu de bovenkant van het bakje, de originele onderkant, op de deksel en het bouwproces van de quadcopter is voltooid!
Figuur 12: de quadcopter met ons eigen hersluitbare bakje.
